


Система автоматической проводки судна (АПС) «Авторулевой»
- Безопасное движение судна в любое время суток и при любых погодных условиях – тумане, ветре, волнениях на водной поверхности с использованием спутниковых навигационных систем (СНС).
- Проводка речных судов и судов смешанного плавания «река-море» в автоматическом режиме, практически без участия человека, по заранее запрограммированной траектории (оси) судового хода (ОСХ) с точностью до 30 м и с вероятностью 95%. При использовании дифференциальных поправок точность увеличивается до 5 м.
Параметры программной траектории судна (эталонные ОСХ, поворотные точки пути судового хода) могут быть получены для всех внутренних водных путей (ВВП), в том числе и для тех, для которых отсутствуют навигационные карты и необходимое навигационное оборудование. Эти параметры определяются с помощью СНС (ГЛОНАСС и GPS) при контрольном проходе во время движения судна по эталонному маршруту, а документированное описание оси судового хода официально регистрируется и подтверждается службами речного флота.
База данных АПС является открытой системой и может быть дополнена топографическими и радиолокационными картами.
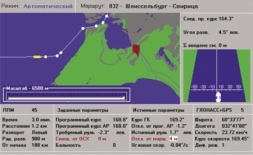
Для судов, не оснащенных гирокомпасом, проводка по заранее запрограммированной ОСХ ведется в ручном (индикаторном) режиме управления с использованием информации, отображаемой на мониторе АПС – непрерывное автоматизированное высокоточное управление судном:
- на прямолинейных участках хода;
- на поворотных точках маршрута;
- на маневрах судна при расхождении с встречными судами, обгоне, смещениях относительно ОСХ и др.;
- практически без перерегулирования по курсу и центру масс судна;
- при изменениях скорости хода и загрузки судна.
При подключении к аппаратуре АПС судовой радиолокационной станции (АПС-РЛС) на мониторе АПС с периодичностью в 2 секунды будет отображаться также радиолокационная информация, совмещенная с картографической информацией, с изображением оси судового хода и с положением судна относительно оси. АПС может быть интегрирована и с аппаратурой СОЭНКИ, а прокладка маршрута производится с использованием электронно-навигационной карты.
Возможны конфигурации системы АПС СНС (по требованию заказчика)
- Для автоматического режима управления движением судна (базовая конфигурация):
- все конфигурации для ручного управления движением судна с применением гирокомпаса (например, Гюйс-М), алгоритмами и программами авторулевого.
- Для ручного режима управления движением судна:
- с использованием топографической или электронной навигационной карты;
- с интеграцией с РЛС для решения задачи расхождения и создания двух независимых источников информации о координатах судна;
- с использованием сигналов станции дифференциальных поправок;
- с использованием дифференциальных поправок, принимаемых от спутниковой системы, например «Глобалстар», с возможностью диспетчерской связи с пароходством.
Сертификат:
РРР № ОИФ-02-117-11
Патенты:
№ 2207296
№ 2207585



